
I början av 1900-talet, när bilindustrin utvecklades i rasande takt, kunde en motor på tio liter vara antingen en enkylindrig enhet eller, låt säga, en rakett. På den tiden höjde ingen på ögonbrynen åt en rak sexa på 23 liter eller en sjucylindrig stjärnmotor från flyget transplanterad in i en bil.
I takt med att massproduktionen skalade upp och kostnadstrycket hårdnade föll allt på plats. Den encylindriga motorn blev ett minne blott. I dag ligger den genomsnittliga cylindervolymen i en konventionell bilmotor på mellan 300 och 600 kubikcentimeter, med en specifik effekt som varierar från ungefär 35 hk/l i en atmosfärisk dieselmotor till 100 hk/l i en högpresterande bensinmotor. Det är de optimala intervallen för masskonsumtionsproduktion — att avvika från dem är helt enkelt inte ekonomiskt lönsamt.
Hur ser då det moderna motorlandskapet ut? I stora drag:
- En motor på 100 hk har vanligtvis fyra cylindrar
- En motor på 200 hk kör oftast på fyra, fem eller sex cylindrar
- En motor på 300 hk använder vanligen åtta cylindrar
Men hur kan egentligen dessa cylindrar arrangeras? Vilka layoutalternativ har ingenjörerna när de konstruerar en flercylindrig motor? Låt oss gå igenom det.
Rakmotorer: Enkla men alltmer opraktiska
Den viktigaste frågan för varje motorkonstruktör är hur man förenklar konstruktionen — håller produktionskostnaderna låga och underhållet okomplicerat. I det avseendet vinner rakmotorn överlägset. Cylindrarna är arrangerade i en enda rad, och att öka kapaciteten är lika enkelt som att lägga till fler av dem.
Så här ser de olika rakmotorvarianterna ut i praktiken:
- Två- och trecylindriga motorer är relativt ovanliga i bilar, även om tvåcylindersformatet håller på att göra comeback tack vare avancerad bränsleinsprutning och turboladdning — den turbomatade tvåcylindern på 85 hk i Fiat 500 är ett bra exempel.
- Den raka fyran är personbilsvärldens arbetshäst och täcker motorvolymer från 1,0 till 2,4 liter.
- Raka femcylindriga motorer är en senare tids uppfinning. Mercedes-Benz banade väg för den dieseldrivna femcylindern 1974 (300D på W123-plattformen), följt av Audis tvåliters bensin-femcylinder två år senare, varefter Volvo och Fiat anslöt sig under slutet av 1980-talet.
- Raka sexcylindriga motorer, länge en europeisk favorit tack vare sin lena gång, har blivit allt ovanligare. Dess ännu längre syskon, den raka åttan, övergavs i praktiken redan på 1930-talet.
Anledningen till denna trend är enkel: ju fler cylindrar man lägger till, desto längre blir motorn — och det skapar allvarliga utrymmesproblem. Att placera en rak sexa tvärgående i ett framhjulsdrivet motorutrymme har till exempel bara lyckats i ett fåtal fall: Austin Maxi 2200 (som krävde att växellådan placerades under motorn) och Volvo S80 med sin ultrakompakta växellåda.

V-formade motorer och boxermotorer: Kompakta men komplexa
Hur förkortar man då en rakmotor? Den eleganta lösningen: dela den på mitten, placera de två halvorna bredvid varandra och driv en gemensam vevaxel med båda. Det är kärnan i V-motorn.
De vanligaste V-motorkonfigurationerna använder en öppningsvinkel på 60° eller 90° mellan cylinderbankerna. Ökar man den vinkeln hela vägen till 180° — cylindrar som pekar rakt bort från varandra — får man en platt motor, även känd som en boxermotor (därav beteckningarna B2, B4, B6).
Kompromisserna jämfört med en rakmotor är betydande:
- Två cylinderhuvuden — vart och ett med sin egen packning och grenrör
- Fler kamaxlar och en mer komplex ventildrivning
- Större bredd (särskilt för boxermotorer), vilket begränsar var de kan installeras
- Högre tillverkningskostnad och mer komplicerat underhåll
På grund av dessa nackdelar används boxermotorer av endast ett fåtal tillverkare — Porsche och Subaru är de mest framträdande i dag.
Vad sägs om att göra en V-motor ännu mer kompakt genom att minska öppningsvinkeln under 60°? Det har gjorts — Lancia Fulvia från 1970-talet hade en V4 med en vinkel på bara 23°. Men det finns en hake: ju smalare vinkel, desto svårare är motorn att balansera. Det för oss in på en av de mest kritiska utmaningarna inom motorkonstruktion.

Motorn:
– Den använder en unik V4-motorkonstruktion.
– V-vinkeln är mycket smal på bara 23°.
– Detta möjliggjorde ett enda cylinderhuvud för båda bankerna.
– Den driver framhjulen.
Motorvibrationer: Krafter, moment och hur man hanterar dem
Ingen kolvbaserad förbränningsmotor är helt fri från vibrationer — det är inbyggt i konstruktionen. Men att hantera vibrationer är avgörande, inte bara för passagerarkomforten. Allvarliga obalanserade vibrationer kan bokstavligen förstöra motorkomponenter, med alla de katastrofala konsekvenser som uppstår när delar lossar vid hög hastighet.
Varifrån kommer motorvibrationer? Det finns tre huvudkällor:
- Ojämna tändningsintervall — i vissa motorkonfigurationer avfyras arbetstakterna inte med perfekt jämna intervall, vilket skapar momentripple. Ett tyngre svänghjul kan bidra till att jämna ut detta.
- Kolvtröghetskrafter — när kolvarna accelererar uppåt och bromsar in vid övre dödläget (och vice versa vid undre dödläget) genererar de tröghetskrafter liknande de du känner när en bil bromsar eller accelererar.
- Vevstagsgeometri — vevstagen rör sig inte i en rät linje och kolvens rörelse är inte en perfekt sinuskurva, vilket introducerar ytterligare kraftkomponenter vid multipler av vevaxelns rotationshastighet.
Dessa högre ordningens tröghetskrafter är i allmänhet försumbara — utom andrordningens krafter, som verkar vid dubbla vevaxelfrekvensen och alltid måste beaktas. När tröghetskrafter i angränsande cylindrar verkar i motsatta riktningar på ett fast avstånd från varandra genererar de dessutom momentpar, vilket lägger ytterligare ett komplexitetslager.
Ingenjörer har två huvudverktyg för att bekämpa dessa krafter:
- Välj en i sig balanserad konfiguration — arrangera cylindrar och vevaxelkast så att krafter och moment naturligt tar ut varandra.
- Lägg till balansaxlar — sekundära axlar med motvikter som roterar i motsatt riktning mot vevaxeln och genererar lika stora och motsatta krafter. Dessa ökar kostnaden och den mekaniska komplexiteten men kan helt neutralisera problematiska vibrationsmoder.
Av alla vanliga motorlayouter är det bara två som är teoretiskt perfekt balanserade: den raka sexan och platta sexan. Det är precis därför BMW och Porsche har hållit fast vid dessa konfigurationer så envist — och varför andra har varit ovilliga att överge dem trots utrymmesproblemen.
Motorbalans per konfiguration: En praktisk guide
Låt oss titta på hur varje viktig motorkonfiguration klarar sig i verkligheten när det gäller vibrationer och balans.
Tvåcylindriga rakmotorer (vevar i samma riktning) beter sig i balanshänseende på liknande sätt som en encylindrig — båda kolvarna stiger och sjunker i fas. Den ryska Oka använde två motroterande balansaxlar för att hantera förstaordningens tröghetskrafter, men andraordningens krafter lämnades okontrollerade. Att lägga till ytterligare två balansaxlar hade varit helt opraktiskt i en så liten och prisvärd bil. Många tvåcylindriga motorer — som den ursprungliga Fiat 500 från 1957 och indiska Tata Nano — kördes helt enkelt utan balansaxlar och förlitade sig på eftergivliga motorinfästningar för att absorbera vibrationerna. Billigt, enkelt och godtagbart för budgetapplikationer.
Tvåcylindriga motorer med vevar på 180° (kolvar i motfas) erbjuder bättre primärbalans men kan bara uppnå jämna tändningsintervall i tvåtaktsform — som användes på förkrigstidens DKW:ar och deras ättlingar, den östtyska Trabanten.
V-twins lever i dag nästan uteslutande vidare på motorcyklar — Harley-Davidson och dess japanska efterföljare är de uppenbara exemplen. NAMI-1 är i det närmaste den enda bil som någonsin använt denna layout. Motvikter på vevaxeln kan ta den nära fullständig balans, men jämna tändningsintervall förblir ouppnåeliga.

Trecylindriga motorer är sämre balanserade än en rak fyra. Tillverkare som Subaru och Daihatsu monterar balansaxlar som standard; Opels beslut att hoppa över en sådan i Ecotec-trecylindern till den andra generationens Corsa sparade kostnader men gav bilen ett rykte om sig att vara ohyfsat vibrerande i den tyska motortidningspressen efter debuten 1996 — den beskrevs som “fullständigt omöjlig att köra i stadstrafik med varierande körsätt.”
Raka fyrcylindriga motorer — den vanligaste layouten i världen — har en fri andraordningens tröghetskraft som bara kan neutraliseras av en balansaxel som roterar med dubbla vevaxelns hastighet. För att eliminera det resulterande momentet behövs en andra motroterande axel. Dyrt, ja — men Mitsubishi, Saab, Ford, Fiat och Volkswagen Group-märken har alla använt denna lösning när komfortkraven så kräver.
Platta fyrcylindriga motorer klarar sig något bättre än sina rakmotsvarigheter — det återstår bara ett andraordningens momentpar som tenderar att gira motorn kring sin vertikala axel. Ändå har både den luftkylda Beetle-motorn och Subarus boxerenheter klarat sig utan balansaxlar i decennier.
Raka femcylindriga motorer har kompenserade primära tröghetskrafter men lider av ett rullande böjningsmoment som ständigt vandrar genom motorblocket — vilket kräver en exceptionellt stel konstruktion. Mercedes-Benz, Audi och Volvo hanterade detta genom förfinade motorinfästningar och motvikter (som den kompressormatade 2,5 TFSI i Audi TT RS), medan Fiats ingenjörer gick längre och använde en fullständig balansaxel.
En intressant fotnot: nästan alla femcylindriga motorer är i grunden fyrcylindriga motorer med en extra cylinder påbultad. Detta modulära angreppssätt möjliggör gemensamma kolvar, vevstakar och ventildrivskomponenter — bara blocket, cylinderhuvudet och vevaxeln (med kast på 72° intervall) behöver ändras.
V6-motorer som ersatte raka sexor delar samma balansegenskaper som en trecylindrig — vilket med andra ord inte är idealt. Den allra första Mercedes-Benz V6 (M112, med tre ventiler per cylinder) åtgärdade detta med en balansaxel monterad i dalen mellan bankerna. PSA-koncernens treliterssexcylindrig placerade en i ett cylinderhuvud. Andra tillverkare valde noggrann förskjutning av vevtapparna — som på Audi V6 — för att minimera vibrationer utan den extra komplexiteten. V6-motorer med 90° öppningsvinkel adderar ett ytterligare problem: i sig ojämna tändningsintervall som ett tyngre svänghjul bara delvis kan jämna ut.
V8-motorer med 90° bankvinkel och vevaxelkast i två ömsesidigt vinkelräta plan är mycket väl balanserade. Jämna tändningsintervall är möjliga att uppnå, och bara två kvarstående momentpar finns kvar — dessa hanteras enkelt av motvikter på vevaxelns ändtappar. Det är en stor del av förklaringen till varför amerikanska ingenjörer omfamnade V8:an med sådan entusiasm: de tolererar helt enkelt inte vibrationer.
V4-motorer var ovanliga och är nu nästan utdöda i bilar. Den europeiska Ford V4 (använd i Taunus, Capri och Saab 96) och Zaporozhetsdans egensinniga V4 krävde båda en balansaxel för förstaordningens momentpar. Kompakthet och kostnad var de drivande faktorerna — balansen kom i andra hand.

V10-motorer delar samma balansegenskaper som en rak femcylindrig. Det hindrade inte konstruktörerna av Formel 1-motorer, Dodge Viper eller Dodge RAM från att använda dem — när du behöver kraften hanterar du vibrationerna.
Vad gäller de mer exotiska layouterna: den platta åttan (som användes i Porsche 917-racerbilar) är i praktiken två platta fyror på en gemensam vevaxel, medan V12- och platta tolvcylindriga motorer reduceras till två raka sexor — vilket förklarar deras exceptionella löpningstjänhet.
VR6, VR5 och W-motorer: Volkswagens förpackningsmästerstycke
Vi nämnde smalvinklade V-motorer som Lancia Fulvia tidigare. I decennier undveks dessa — svårare att balansera än 60°- eller 90°-layouter, med förpackningsvinster som inte verkade värda besväret. Sedan förändrades prioriteringarna.
Två utvecklingar förändrade spelplanen:
- Hydrauliska motorinfästningar blev allmänt tillgängliga och undertryckte vibrationstransmissionen dramatiskt oavsett motorns teoretiska balans.
- Utrymmet under huven blev alltmer begränsat, vilket gjorde kompakthet till en premiumegenskap. Vem hade kunnat föreställa sig en blygsam halvkombi med en 2,8-liters sexcylindrig motor? Volkswagen lyckades med det.
Volkswagen VR6 — där “VR” står för V-Reihen (V-rad) — driver smalvinkelkonceptet längre än vad Lancia någonsin gjorde och använder bara en 15° vinkel mellan bankerna. Resultatet är så kompakt att det i praktiken fungerar som en förskjuten rakmotor, och anmärkningsvärt nog använder den ett enda cylinderhuvud för båda bankerna. En 2,8-liters sexcylindrig motor som passar där en konventionell V6 inte skulle rymmas — den debuterade i tredje generationens Volkswagen Golf.

Därifrån tog Volkswagens ingenjörer konceptet vidare:
- VR5 kom som VR6:an med en cylinder borttagen.
- W8 kombinerade två förkortade VR-enheter (fyra cylindrar vardera) på en gemensam vevaxel — monterad i flaggskepps-Passat-sedan.
- W12 debuterade 1998 i W12 Roadster-konceptet: två VR6-motorer sammankopplade i en 72°-vinkel på en vevaxel.
- W16 — med fyra turboladdare — driver Bugatti Veyron till 431 km/h och är den mest extrema serieproduktionsapplikationen av denna arkitektur.
Varför existerade inte dessa layouter tidigare? Modern datorstödd konstruktion gjorde dem möjliga. Att optimera öppningsvinkeln, vevtapparnas positioner, tändningsföljden och balansegenskaperna i sådana komplexa geometrier hade varit praktiskt taget omöjligt utan den beräkningskraft som funnits tillgänglig från 1990-talet och framåt. Vevaxeln i en W12 ensam är en maskinists mardröm — den typ av detalj som bara är meningsfull när en dator har verifierat varje tolerans.
Vad som verkligen spelar roll i verklig motorkonstruktion
Om det finns en slutsats att dra av allt detta är det att teoretisk balans sällan är den avgörande faktorn när en ingenjör väljer motorlayout. De verkliga prioriteringarna är:
- Förpackning — ryms den i motorutrymmet?
- Vikt och effekttäthet — vad är det bästa förhållandet för applikationen?
- Produktionskostnad — kan den dela komponenter inom ett modellprogram?
- Modularitet — alltmer bygger tillverkare hela motorfamiljer från en gemensam kolvs och borrningsarkitektur, från trecylindriga ekonomienheter hela vägen upp till tolvcylindriga flaggskeppsmotorer
Mercedes-Benz nuvarande motorutbud är ett läroboksexempel på det modulära angreppssättet: en gemensam arkitektur ligger till grund för motorer med vitt skilda effektuttag och cylinderantal.
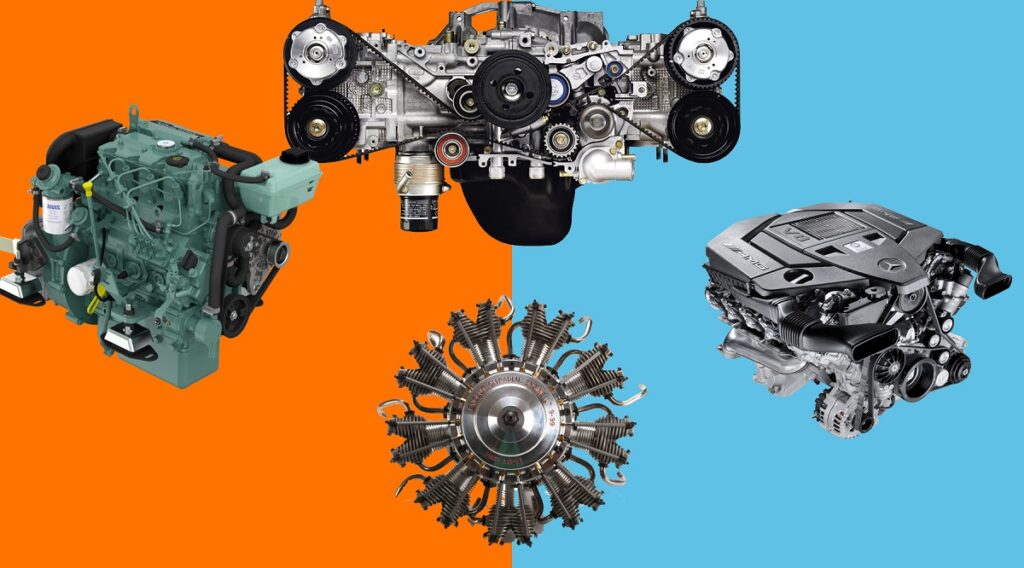
Platt motor (Boxer) (Överst): Cylindrarna ligger horisontellt och pekar bort från varandra i en 180-graderslayout. Märken som Porsche och Subaru använder vanligen denna konstruktion för en lägre tyngdpunkt.
Stjärnmotor (Nederst): Cylindrarna är monterade i en cirkel runt en central vevaxel, likt en stjärna. Dessa användes traditionellt i klassiska propellerdrivna flygplan.
Rakmotor (Vänster): Cylindrarna placeras en efter en i en enda rak rad. Detta är den vanligaste konstruktionen i standard vardagsbilar.
V-motor (Höger): Cylindrarna är uppdelade i två rader vinklade mot varandra och bildar ett “V”. Denna konfiguration möjliggör fler cylindrar (som V6 eller V8) på ett mycket mer kompakt utrymme.
Och vad gäller vibrationer — det är värt att komma ihåg att teoretisk och faktisk balans är två helt olika saker. Även en perfekt balanserad rak sexa kommer att skaka om dess vevaxelsammansättning inte är korrekt balanserad eller om dess kolvar och vevstakar varierar märkbart i vikt. Verkliga produktionstoleranser och komponentdeformation under belastning innebär att ingen motor i praktiken är lika jämn som ekvationerna antyder. Det är därför motorinfästningarnas konstruktion — hur drivenheten är isolerad från resten av bilen — är lika viktig som layouten i sig. Ibland viktigare.
Detta är en översättning. Du kan läsa originalet här: https://www.drive.ru/technic/4efb337600f11713001e54e1.html
Published June 15, 2026 • 12m to read



